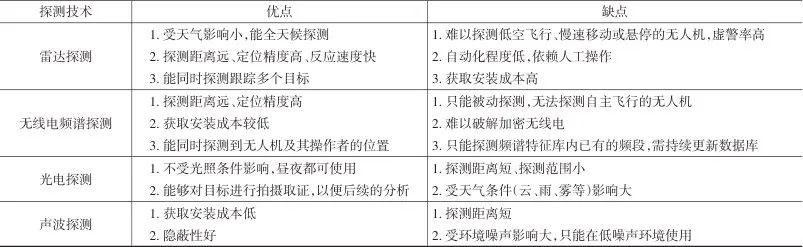
3.2.4 声波探测
声波探测技术通过声波传感器捕捉无人机在飞行过程中产生的声波信号,通过将其与预先建立的音频指纹数据库进行匹配,从而实现对无人机的监测和识别。
声波探测技术具有成本低、隐蔽性好和实时性高等优点。然而,声波在空气中传播时会随着距离的增加而衰减,限制了声学传感器的探测范围。因此,声波探测技术通常适用于低噪声且目标距离较近的应用情况。Fang等[20]开发了一种增强型光纤声学传感器,展示出高测量灵敏度以及高保真语音恢复能力,能够实现精确的无人机定位。这表明,即使现阶段声波探测技术在实际应用中存在限制,但通过适当的特征提取并结合深度学习算法,其仍有在复杂环境下实现对无人机精准探测和识别的潜力。
3.2.5 多传感器融合探测
使用单一探测方法不可避免地会存在探测盲点,而多传感器融合探测技术能够克服单一传感器在某些特定场景的局限性,显著提高探测系统的鲁棒性和准确性。常见的组合有雷达+光电探测、光电+声波探测、光电+无线电频谱探测等。
雷达和光电传感器的组合拥有极好的互补性。雷达提供全向广域扫描,但无人机识别率低且扫描频率低,光电传感器能够识别和追踪目标,但探测距离短且无法对目标区域进行动态探测,这种组合动态地弥补了彼此的缺陷。美国的M-LIDS系统就是雷达光电融合探测的典型应用。Lindner等研发了一种结合雷达和光学传感器的无人机检测辅助系统MODEAS,可以自动检测和跟踪天空中几公里范围内的无人机。
将光学和声学传感器相结合是一种传统的传感器融合技术,可以提高检测精度。通过声学传感器捕获无人机发出的噪声信号,测量目标的大致方向,然后通过光学传感器准确定位追踪。Ding等提出了一种基于声学和光学传感器融合的系统,能够实现对无人机的大范围探测和高精度三维跟踪。
光电和无线电频谱探测的组合相当于光电和雷达探测组合的低成本解决方案,它能在成本低廉的情况下保持较高的探测精度,同时实现对无人机的识别和跟踪。Aledhari等提出了一种基于人工神经网络的无人机探测系统,通过神经网络算法融合无线电频谱数据以及图像数据,实现了75%的验证准确率。
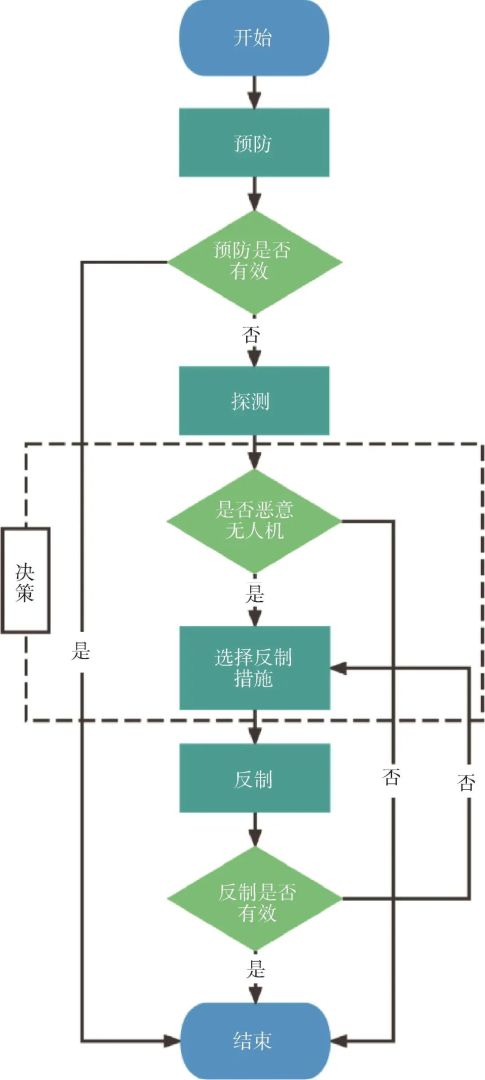
3.3 反制措施
为保障重要区域的安全,当探测到具有威胁的无人机后,需要对其采取有效的反制措施。根据是否对无人机造成物理损坏,无人机反制技术主要可以划分为两大类:软杀伤技术和硬杀伤技术。表2对各种无人机反制技术进行了比较。
▼ 表2 无人机反制技术比较
▼ Table 2 Comparison of UAV countermeasure technologies
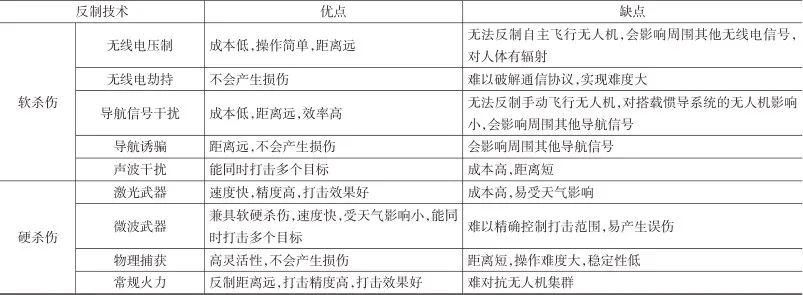
3.3.1 软杀伤技术
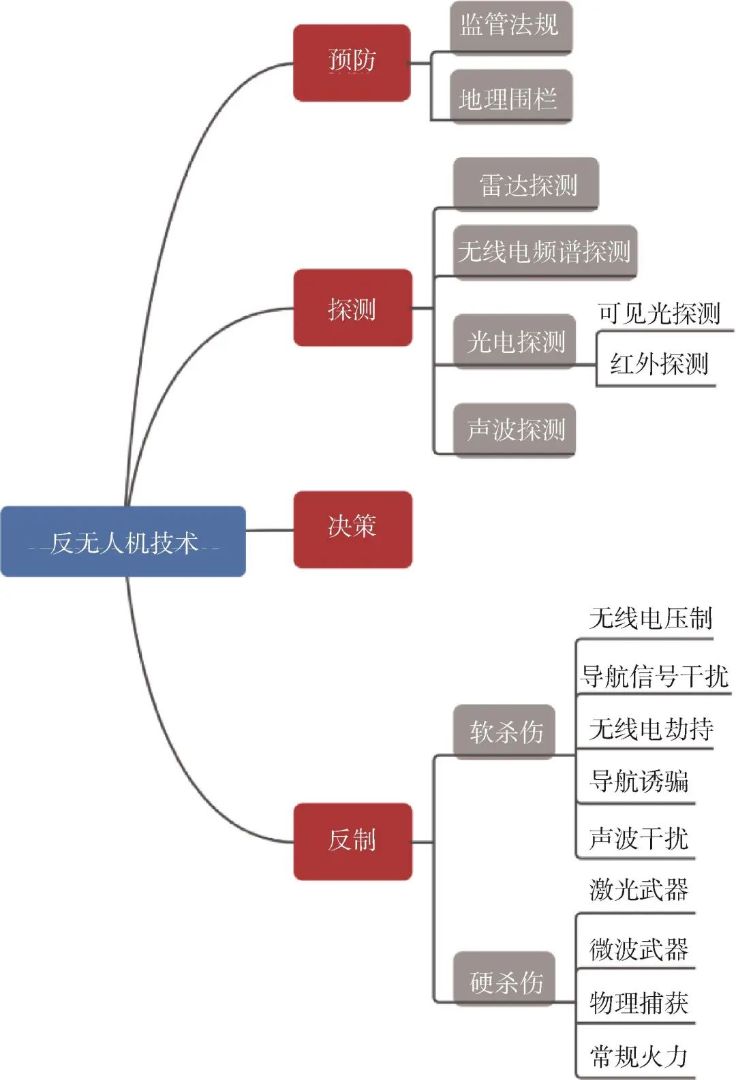
无人机软杀伤技术是一种非物理性的反无人机手段,通过干扰、破坏或控制无人机的导航、通信和其他关键系统,达到迫使无人机降落、返航或失效的目的,主要包括无线电压制、无线电劫持、导航信号干扰、导航诱骗和声波干扰五种。
无线电压制技术的基本原理是识别并获取无人机遥控信号的特定频率,发射相同频率的干扰波,阻断无人机与地面站之间的通信链路。现代无人机普遍采用自适应跳频和扩频技术来增强对外部干扰的抵抗力。当前的无线电压制设备通常采用以下两种方法来应对:(1)动态频率干扰技术。通过跟踪无线电信号的变化,快速完成对无线电跳变频段的捕获、分析和识别,发射相应频段的无线电信号进行精准干扰。(2)宽频带干扰方法。在无人机遥控信号的常见频段,如2.4 GHz和5.8 GHz,施加大功率的全面频段宽带阻塞干扰。无线电压制技术是目前市面上应用最广泛的反制手段之一,广泛应用于民用和军用场景。例如美国的Liteye反无人机系统、俄罗斯的Mosquito Repellent电子站系统等。然而,这种手段的辐射较大,对人体有害,并且容易对周围的无线电信号产生影响。
无线电劫持技术通过截获、分析并伪造目标无人机与控制站之间的无线电信号,然后以更高的功率向目标无人机发送伪造的控制信号来覆盖原有信号,从而夺取目标无人机的控制权。其优势在于能够直接控制目标无人机,且不会对周围无线电信号造成干扰。然而,随着无人机通信技术的提升和加密算法的进步,无人机通信的安全性不断增强,使得破解通信协议变得更加困难。
导航信号干扰技术通过向目标无人机发送特定频率的干扰波形,与无人机接收的卫星导航信号产生叠加效应,从而导致无人机无法进行精确定位。然而,目前许多无人机都装备有惯性导航系统(Intrtial Navigation System,INS),即使在卫星导航信号受到干扰的情况下,无人机也能利用INS维持一定程度的自主飞行能力,这使得导航信号干扰技术的应用范围受到了限制。
导航诱骗技术通过捕获无人机的导航信号并进行特定的时间和多普勒效应调制,生成虚假信号以误导无人机飞往错误的位置或返回起。通过在重要区域广播虚假的导航信号,可以诱导入侵无人机飞离该区域。然而,这种手段也可能影响到范围内其他正常飞行无人机的导航信号。
声波干扰技术利用同频共振的原理,通过发射与无人机内部陀螺仪相同频率的超声波引发共振,影响其正常工作。实现声波干扰需要功能强大的超声波发射器,导致其成本较高,且声波强度随着距离增加而衰减的特点也限制了其反制距离。这些因素使得声波干扰技术在短期内难以广泛应用。
3.3.2 硬杀伤技术
硬杀伤技术是反无人机手段中的一种物理性攻击方式,它主要通过物理手段拦截或破坏无人机,使其丧失飞行能力,主要包括激光武器、微波武器、物理捕获以及常规火力四种。
激光武器通过发射高能激光束直接照射无人机,依靠其高能量来烧毁无人机的壳体或关键部件,导致无人机的结构损坏或电子系统失效。激光武器的优势在于其发射速度快、打击精度高、反制效果显著以及转移火力快,是目前反无人机作战中最具技术可行性的武器。美国的ATHENA激光武器系统、俄罗斯的Peresvet激光武器系统以及中国的“沉默猎手”防空系统等都采用了激光武器对无人机进行打击。然而,激光武器仍存在一些短板,例如受天气条件影响较大,在雨、雪、雾等复杂天气条件下,其反制效果可能会受到影响。
微波武器通过发射高功率、宽角度的倒锥形高强度电磁脉冲,利用微波衍射和无人机内部电路的耦合作用,扰乱无人机的控制系统或烧毁其天线、电路元件、导航和通讯系统。微波武器结合了软硬杀伤能力,具备同时打击多架无人机的能力,能够有效对抗无人机集群,且攻击速度快,受天气影响小,具有突出的军事应用前景,是目前各国无人机反制技术研究的重要领域之一。美国对高功率微波武器的研究高度重视,逐渐将其推广并应用于实战中,研发了Leonidas多目标反电子系统以及THOR反无人机系统等。然而,微波武器也存在一些缺陷,由于波束宽,在打击目标时难以精确控制打击范围。此外,微波武器需要强大的电源支持并且通常尺寸较大、质量较大,这限制了其灵活部署能力。
物理捕获技术旨在使用物理手段完好无损地拦截和捕获无人机,主要方法包括鸟捕获、网捕获和无人机捕获三种方式。物理捕获技术环保且灵活,无损害风险,但鸟捕获训练成本高,且存在不确定性,网捕获的射程和操作技能要求限制了其应用,无人机捕获也需要较高的操作技巧和设备支持。
常规火力手段涉及使用枪支、高射炮、防空导弹等传统防空武器来直接摧毁无人机。技术具有高成熟度,能够实现远距离打击,打击精度高,具有显著的打击效果,尤其适用于对飞行高度较高的大型无人机的有效打击。然而,此手段难以应对多个目标,无法满足针对无人机集群的反制需求。
反制措施实施结束后,对于反制效果的评估也是反无人机处理链中的重要环节,其结果能够反映采取的反制措施在当下场景的适用程度以及反制效能,从而让操作员判断是否需要进行再反制或更换反制措施,并在反制结束后对评估较低的方面进行改进,以提高反制技术整体效能。
当前国内外对于无人机反制效果评估的相关研究十分有限,国际上也并没有形成统一的评估体系。比较常见的评估指标有反制成功率、反制时间以及反制结果等。
反制成功率是能够最直观体现采取无人机反制措施在当下场景的有效性的指标,在模拟实验或者实战中对探测到的无人机进行反制,通过计算一定次数的反制操作中无人机不再对受保护对象构成威胁的有效行动次数来评估反制措施在该场景下对无人机成功反制的概率。
评估的另一个重要参数是有效反制无人机所需的时间。即从开始反制到成功反制所需的时间。如果反制时间过长,则可能会导致错过最佳反制时机,造成严重损失。例如,反制时间过长导致装载炸药的无人机足够靠近目标,导致其爆炸造成损失,或者导致无人机已经采集到足够多用于情报任务的图像。
由于各种反制措施原理的差异,对于无人机的反制效果也有区别,可能会出现坠落、摧毁、悬停、返回、着陆等结果。根据反制结束后目标无人机的实际状态与期望状态之间的差异,反制结果的评估可分为三种情况:彻底反制、部分反制、无效反制。反制结果这一指标能够较直观地描述采取的反制措施在当下场景的适用程度。
在探测到入侵的无人机后,操作员需要根据目标无人机的详细信息以及当下场景来制定反制策略,决定对入侵无人机采取何种处置手段。主要包括两部分内容:恶意无人机的识别、反制措施选择。
为对无人机进行识别管理,一些国家制定了相关无人机登记制度,中国在2023年发布的《无人驾驶航空器飞行管理暂行条例》中规定所有进行飞行活动的无人机都需要对其类型、型号、唯一产品识别码等信息进行登记;美国早在2019年就制定了无人机系统远程ID标准规范,允许政府和民间根据无人机的远程ID识别无人机系统。操作员可以利用探测手段对无人机的型号、远程 ID等信息进行识别,然后根据其登记情况判定其是否为恶意无人机。
如果确定目标无人机具有威胁,就需要操作员根据目标无人机类型以及当下场景选择最适合的反制措施。选择合适的反制措施不仅能够确保对目标无人机进行有效反制,还能够防止反制技术可能引发的次生灾害。一般来说,硬杀伤技术主要应用于军事场景,适合对军用中大型无人机以及集群无人机进行打击,软杀伤技术主要应用于民用场景,适合反制低慢小无人机。无线电压制技术凭借其成本低、反制距离远以及具备集群无人机打击能力的优势,使得其作为一种软杀伤手段仍能够广泛应用于军事场景中。物理捕获虽然是一种硬杀伤手段,但其反制距离短,只适合对低慢小无人机进行反制,因此在军事场景中应用有限。表3对各种反制技术的适用场景以及目标无人机类型进行了对比,为反无人机决策中选择合适的反制手段提供了参考。
▼ 表3 反制技术应用场景以及应用模式
▼ Table 3 Application scenarios and modes of countermeasures technology

反无人机决策是一个复杂的过程,在实际情况中,很多时候反制场景都会随着周围环境的变化以及目标无人机飞行活动的变化而发生改变,仅依靠操作员自身经验进行决策就显得捉襟见肘。由人工智能技术支持的反无人机决策可以成为对抗无人机的有效方法,人工智能可以在模拟中接受训练,通过不断学习以适应新的威胁,根据具体的环境和情况做出自主决策,极大提升决策的效率以及准确性。国内外均有相关研究在探索利用人工智能辅助反无人机决策的可能性。Mehta等结合传统的信号处理和机器学习,提出了一种人机协作框架,用于提高反无人机操作的效率和准确性;孙学章等提出基于卷积神经网络的反无人机蜂群智能决策算法,实现对无人机蜂群拦截方式的智能决策,且具有较高的决策精度。
4 反无人机领域面临的挑战
当前,反无人机技术尚未实现高度智能化,主要探测和反制手段依赖人工操作,因此操作人员的熟练度对探测和反制效果有显著影响,这可能导致效率降低和误操作的风险,如对合法无人机的错误反制或选择不当的反制手段,可能引起无效操作或次生灾害。
在军事应用场景中,智能化水平的不足使得反无人机系统难以适应战场上复杂多变的环境和快速变化的战争态势,这可能导致系统在应对无人机威胁时处于被动。随着无人机技术在智能避障、抗干扰和隐身材料等方面的进步,对反无人机技术的智能化提出了更高的要求。
效费比低是当前制约反无人机技术发展的主要因素。目前,大多数无人机探测和反制技术未能有效平衡性能与成本之间的关系。
雷达探测、激光武器等高性能手段的设备购买、安装和运营成本高昂,需要大量资金支持,同时需要具备相当专业技术的操作员来充分发挥其效能。这导致除了军队和一些重要单位外,其他组织和单位很难具备这些设备的安装和运营条件。而无线电频谱探测和压制等低成本手段在面对具有自主飞行能力的无人机时效果有限,且可能对周围无线电信号造成干扰或对人体产生有害辐射。
此外,无人机技术的发展降低了无人机的成本,而一套完整的反无人机系统则可能需要高昂的费用,这种成本上的不平衡使得反无人机技术在应对无人机安全问题时面临挑战,并且成为其发展中的主要困境之一。
4.3 技术发展迟滞
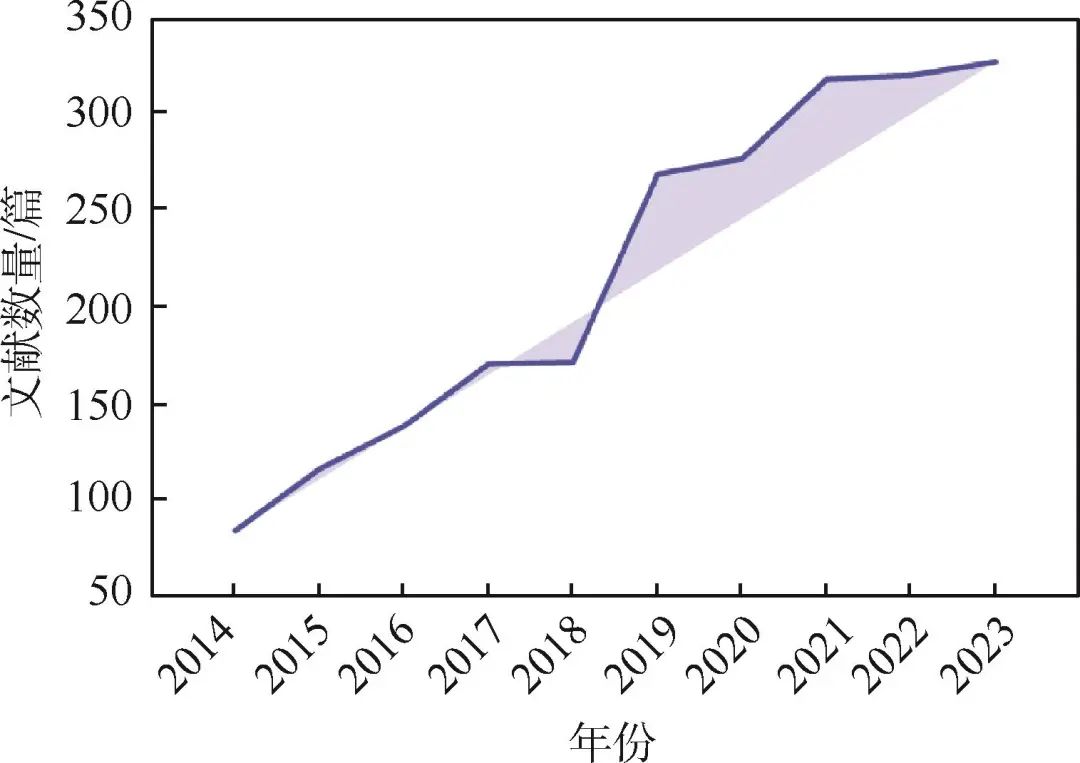
尽管近几年来反无人机技术的研究和发展速度逐年稳步增长,但与无人机技术相比,反无人机技术由于起步晚、受重视程度低、应用场景有限等因素,其发展速度远远落后于无人机技术。
自21世纪起,无人机技术日趋成熟,无人机体积趋小、速度趋快、飞行高度攀升。然而,反无人机技术的发展却未能与之同步。对于小型、高速、高飞的无人机,即便借助雷达探测、激光武器等高效手段,实现有效探测与精确打击仍面临挑战。同时,无人机通信技术的进步提升了无线电安全性,使得破解通信协议愈发困难,这导致无线电频谱探测、压制、劫持等低成本手段的适用性逐渐减弱。这种发展滞后导致现有反无人机技术在保护重要区域和关键设施空域方面的能力受限。
5 未来反无人机技术展望
人工智能技术,作为当今科技领域的翘楚,正以其革命性的力量推动着各行各业的创新与转型,极大地提升了生产效率和生活品质。将这一前沿技术应用于反无人机领域,无疑代表了一种新兴且高效的对抗手段。相较于传统依赖人工干预的反无人机技术,人工智能赋予了反无人机系统更高的智能化水平,可以显著提升探测、决策与反制效率。
通过深度强化学习,人工智能能够模拟大量的反无人机场景,从而精准区分目标无人机与周围的物体,甚至能精准辨识不同无人机之间的细微差别。这种卓越的识别和分类能力使得反无人机系统能够精准锁定目标。同时,经过训练的人工智能能够不断优化反无人机系统的决策部署,根据实时情形选择最合适的反制手段,并精准控制反制设备实施打击。在决策准确性、操作反应速度和精准度方面,人工智能展现出的潜力均超越了经验丰富的操作员。
目前,已有诸多研究致力于探索人工智能技术与反无人机技术各个环节的融合,尽管这些技术尚处于构想与试验阶段。但是,人工智能的引入无疑将为反无人机技术在与无人机的较量中带来巨大帮助。因此,结合人工智能技术必将成为未来反无人机技术发展的重要趋势之一。
5.2 移动反无人机装备轻量化升级
微型化是无人机技术的重要发展趋势,特点在于体积小、速度快、隐蔽性强且灵活。而传统反无人机设备大多固定于地面,缺乏灵活性,探测和反制距离受限。继续依赖传统设备对抗无人机,将导致反无人机技术的效费比问题加剧。
为解决这一问题,开发轻量化、高灵活性的高性能反无人机设备成为未来的重要发展方向。目前,一些新型反无人机设备已经开始投入使用,如便携式干扰枪和车载察打结合反无人机系统。这些设备在灵活性上有所提升,其可移动性一定程度上解决了距离限制问题,但仍存缺陷。如干扰枪依赖人工操作,可能影响准确性;车载系统受限于地面,对高空无人机探测反制效果有限。
Rudys等提出将低成本的小型船用雷达嵌入固定翼无人机的机翼中,从而能够在空中对目标无人机进行全方位探测。美军曾使用一架“郊狼”无人机装载高功率微波武器,实现了对10架无人机的成功拦截。结合无人机的高灵活性,为解决现有探测反制设备灵活性低、距离有限等问题提供了一种有效的解决方案。
未来,通过将更多的无人机探测和反制设备轻量化、小型化,并集成到无人机等高灵活性的移动平台上,能够在一定程度上解决现有反无人机技术效费比低的问题,进一步推动反无人机技术的发展。
5.3 一体化协同反无人机系统构建
随着无人机技术的快速发展,其在军事作战场景的影响力也在迅速增长。目前,无人机作战已经进入到蜂群作战阶段,无人机蜂群技术在军事领域的应用对反无人机技术提出了更为严峻的考验。传统的单个无人机探测和反制手段在应对由多个不同型号、不同功能的无人机组成的蜂群时,已显露出其局限性。因此,开发集决策指挥、侦察探测、反制拦截功能于一体的协同反无人机系统变得尤为重要。
一体化协同反无人机系统通过整合多种探测和反制技术,实现从探测到反制阶段的无缝对接。在探测阶段,系统利用多传感器协同以及多源数据融合技术,实现对空域的全方位、全天候监控,并精确探测识别不同型号无人机。在无人机反制阶段,结合人工智能技术,根据不同打击目标以及不同反制场景进行智能决策,选择最合适的反制手段,集成软硬杀伤于一体,形成一个全方位、多层次的智能反制网络,实现对无人机蜂群的有效对抗。
多手段融合的一体化协同反无人机系统将成为未来反无人机技术的重要研究方向,它通过将多种探测反制手段结合,将不同技术互补以提升系统整体效能,从而弥补反无人机技术与无人机技术发展速度间的差距,为未来对抗无人机威胁提供了一种有效的解决方案。
6 结束语
综上所述,无人机技术在军用和民用领域带来的安全隐私威胁在当下呈现逐渐复杂化和多元化的趋势,这对反无人机技术提出了更高和更迫切的要求。现有反无人机技术仍存在技术手段单一、效费比低、智能化程度低等局限。而随着人工智能技术等新兴技术的发展,国内外反无人机研究开始更多地关注将这些技术与反无人机解决方案相结合,不断提高无人机探测反制手段的效能,为反无人机技术在未来与无人机的对抗以及对空域的保护中提供技术支撑。